Description:
This repository is meant to link all repositories and literature related to the TorqueTuner.
Description
The TorqueTuner (TT) was first developed in 2020 by Kirkegaard, Bredholt, Frisson and Wanderley as an embedded haptic module for DMIs like the T-Stick. Its main focus was simulation of haptic effects associated with turning a knob, affordability and portability of force feedback devices.

Afterwards, it was further developed to be a prototyping and authoring tool of 1-DOF haptic effects for the IDMIL, replacing the initial motor with a more powerful one.
It is wifi capable and can run OSC and Libmapper over the local network thanks to the ESP32. You can learn more about it in the links provided below.
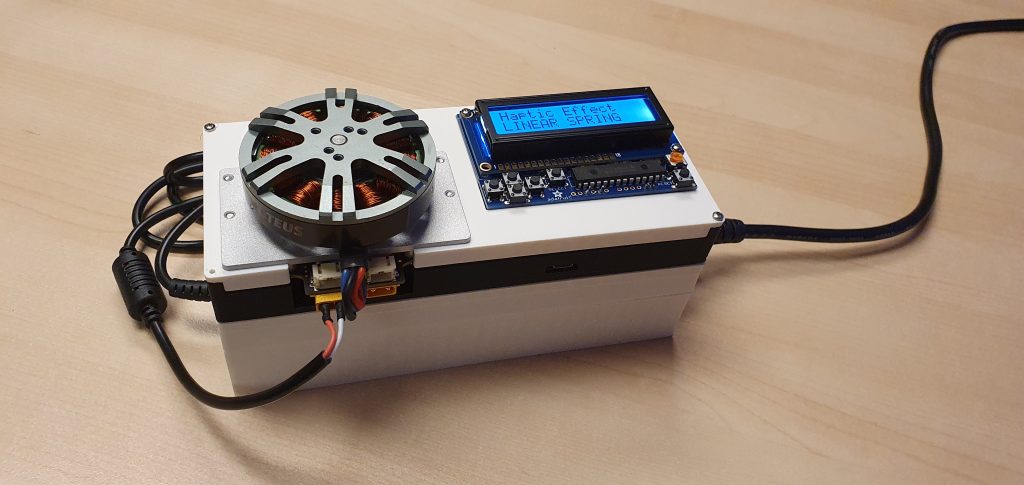
Hardware
The first version of the TorqueTuner featured a Mechaduino (open source stepper motor). The second version had the Mechaduino replaced with a Moteus motor (open source brushless DC motor). The controllers firmware for both versions was modified to send and receive data via I2C/SPI from an ESP32. More information can be found in the links below.
Future Work
This is an open source-project, as such all documents and information is made available to anyone who wished to replicate the TorqueTuner. Any future development is meant to further the project but not replace what has currently been done.
- There is in the works the idea to replace the ESP32 with a Bela beagle board or a raspberry pi for added computational power and data transfer speeds.
- Improvement to the haptic authoring tool
- Better integration with authoring tools like Feelix or ForceHost
- Improvement on haptic responses, removal of Aliasing in haptic effects
Related Projects
- TorqueTuner : The first version of the TorqueTuner
- Sustainable Haptic Development : The Revised version of the TorqueTuner
- TorqueTuner Template Project : Current template code to be placed on the ESP32
- TorqueTuner Firmware : Current firmware for the Moteus Controller on the TorqueTuner
- TorqueTuner Reed-Model DMI : A actively worked on application of the TorqueTuner by Maxwell Gentili-Morin for implementing the reed/mouthpiece model as a haptic effect.
- TorqueTuner Score Animation (Under Construction)
- Feelix : A haptic authoring tool developed at Eindhoven University of Technology by Anke van Oosterhout
- GSoC x SAT x Feelix TorqueTuner Project : A Google Summer of Code Project where Maxwell Gentili-Morin worked to adapt the TorqueTuner to use Feelix as its haptic authoring environment.
- TorqueTuner with Bend-aid interface: An visual interface designed for pitch modulation, performance enhancement, and user experience investigation.
Related External Literature
- Haptic techniques for media control (Snibbe et al., 2001)
IDMIL Participants:
Research Areas:
Publications:
- Kirkegaard, M., Bredholt, M., Frisson, C., Wanderley, M. M. (2020). TorqueTuner: A self contained module for designing rotary haptic force feedback for digital musical instruments. In Proceedings of the 2020 International Conference on New Interfaces for Musical Expression (NIME 2020) (pp. 6). Birmingham, UK.
- Frisson, C., Kirkegaard, M., Pietrzak, T., Wanderley, M. M. (2022). ForceHost: An Open-source Toolchain for Generating Firmware Embedding the Authoring and Rendering of Audio and Force-feedback Haptics. In Proceedings of the 2022 International Conference on New Interfaces for Musical Expression (NIME2022). Auckland, NZ.
- Frisson, C., Wanderley, M. M. (2023). Challenges and Opportunities of Force Feedback in Music. In Arts. Paterson and Marcelo Wanderley, J. M. (Eds.). MDPI.
- Gentili-Morin, M., Wanderley, M. M. (2024). R-FF: A Single Reed Haptic Library for the TorqueTuner. In Proceedings of the 2024 International Conference on New Interfaces for Musical Expression (NIME2024). Utrecht, NL.
- Piao, Z., Frisson, C., Van Kerrebroeck, B., Wanderley, M. M. (2024). Assessing the Impact of Force Feedback in Musical Knobs on Performance and User Experience. In Actuators (pp. 15). Mohammadi, A., Martinez-Hernandez, U. (Eds.).